Ich muss für die Schule einen Tresor mit einem 3x4Keypad , einem Servo und einem Lcd Display programmieren. Dafür habe ich einen Arduino UNO. Das Programm funktioniert aber nicht so wie ich es will.
Wenn ich eine Taste drücke, die nicht # oder * ist soll sie auf dem Display angezeigt werden und auf der Variable inputPasswort gespeichert werden. Diese sollen aber nicht immer in der ersten Spalte stehen, sondern sollen nebeneinander in einer Zeile angezeigt werden. Wenn ich # drücke soll der Arduino prüfen ob das eingegebene Passwort richtig ist. Wenn das der Fall ist, soll sich der Servo öffnen und das Display "Passwort richtig" anzeigen. Wenn nicht soll der Servo geschlossen bleiben und das Display soll "Passwort falsch" anzeigen. Wenn * gedrückt wird soll das Programm alle bisher eingegebenen Zahlen von der Variable inputPasswort löschen.
Das Display zeigt die Zahlen aber nur kurz und immer an verschiedenen Stellen an. Der Arduino erkennt auch nicht wenn das Passwort richtig ist. Kann mir bitte jemand helfen?
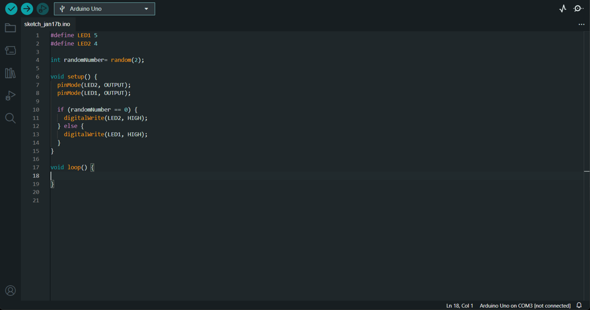
So sieht mein Programm bisher aus:
#include <LiquidCrystal_I2C.h>
#include <Wire.h>
#include <Servo.h>
#include <Keypad.h>
LiquidCrystal_I2C lcd(0x27, 16, 2);
int cursorPosition = 0; // Variable für die Position des Cursors
Servo IHateThis; // Servo heißt jetzt "IHateThis"
const int ROW_NUM = 4; // Anzahl der Tastenfeld Reihen
const int COLUMN_NUM = 3; // Anzahl der Tastenfeld Zeilen
byte pin_rows[ROW_NUM] = { 9, 8, 7, 6 }; //die Pins für die Reihen des Tastenfelds
byte pin_column[COLUMN_NUM] = { 5, 4, 3 }; //die Pins für die Zeilen des Tastenfelds
char keys[ROW_NUM][COLUMN_NUM] = {
{ '1', '2', '3' },
{ '4', '5', '6' },
{ '7', '8', '9' },
{ '*', '0', '#' }
};
Keypad keypad = Keypad(makeKeymap(keys), pin_rows, pin_column, ROW_NUM, COLUMN_NUM);
char Passwort[5] = { '0', '1', '2', '3', '#' }; //Array mit Länge des Passworts (4 + #) und dem Passwort selbst (0123)
String inputPasswort; // Variable um die eingegebenen Tasten abzuspeichern
void setup() {
inputPasswort.reserve(4);
lcd.init();
lcd.clear();
lcd.backlight(); //Das Display soll beleuchtet sein
IHateThis.attach(12); //Servo ist an Pin 12 angeschlossen
IHateThis.write(140); //Servo ist anfangs in der Position 140 (Tresor ist zu)
}
void loop() {
char Taste = keypad.getKey(); //Variable "Taste" ist hier definiert
if (Taste != '*' && Taste != '#') {
lcd.setCursor(cursorPosition, 0); // Cursor position at position 0 of the first row of the LCD.
lcd.print(Taste); //Wenn eine Taste außer * und # gedrückt wird, wird diese auf dem Display angezeigt
cursorPosition = cursorPosition + 1;
}
if (Taste == '#') { //Nachdem # gedrückt wurde, wird überprüft ob das eingegebene Passwort dem tatsächlichen Passwort entspricht
if (inputPasswort == Passwort) { //Wenn das eingegebene Passwort dem tatsächlichen Passwort entspricht, wird für 3 Sekunden "Passwort richtig" angezeigt. Danach wird der inhalt der Variable inputPasswort gelöscht, der Servo geöffnet, die Variable cursorPosition auf 0 zurückgesetzt und das Display geleert.
lcd.setCursor(0, 0);
lcd.print("Passwort richtig");
delay(3000);
inputPasswort = "";
lcd.clear();
cursorPosition = 0;
lcd.setCursor(cursorPosition, 0);
IHateThis.write(30);
}
if (inputPasswort != Passwort) { //Wenn das eingegebene Passwort nicht dem eingegebenen Passwort entspricht, wird "Passwort falsch" für 3 Sekunden angezeigt, und danach die reset schleife ausgeführt
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Passwort falsch");
delay(3000);
reset();
}
}
if (Taste == '*') { //Wenn * gedrückt wird, wird die reset Schleife ausgeführt
reset();
}
}
void reset() {
inputPasswort = ""; //Alles was auf der Variable inputPasswort gespeichert war, wird gelöscht
lcd.clear(); //Display wird geleert
cursorPosition = 0; //Die Variable cursorPosition wird auf 0 gesetzt
IHateThis.write(140); //Der Servo wird geschlossen
}