Hallo und freues Neues! 🥳
Vorwort
Ich habe mal Physikalische Technik B.Sc. studiert. Es gab das Fach Regelungstechnik, in dem ich über PT-Glieder und Reglereinstellungsverfahren unterrichtet worden bin. Leider ist das Fach über 7 Jahre her und ich habe Reg.-technik nicht mehr gebraucht. Ich habe also Wissen à la "Ich hatte es im Kopf, und ein paar Sachen weiß ich jetzt noch, aber ich bin mir nicht mehr 100%-ig sicher."
Mittlerweile bin ich in der Softwareentwicklung und wollte einen PT2-Regler programmieren. Aber es geht hier gar nicht ums Programmieren, denn ich habe vorerst Fragen zum PT2-Verzögerungslied, bevor ich weitermachen kann.
Fragen
1.) Warum zum Teufel steht auf jeder Internetseite, wenn man PT2-Verzögerungslied googelt, eine andere Formel für die Sprungantwort? Ich habe frustrierterweise gestern die DGL lösen lassen und bekam
heraus. Der Vorteil ist hier, dass ich noch y(0) als Startwert (Wert der letzten Berechnung) habe; und dass ich K als Verstärkung habe; und dass ich T1 und T2 habe. Das ergibt dann:
Auf den Internetseiten wurden manchmal T1 und T2 zusammengefasst. Oder es gibt keinen Startwert. Oder kein K. Es sind auch andere Umformungen, sodass im Diagramm unten die Kurve völlig fehlt und gerade ist.
Meine Formel ist doch gut, oder? Auch wenn hier nicht T1 == T2 sein darf, sonst 0 im Nenner. Deswegen überleg ich…
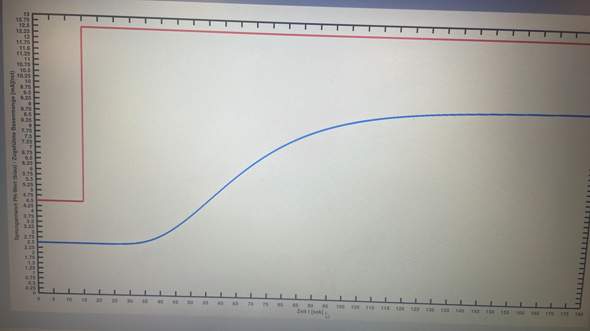
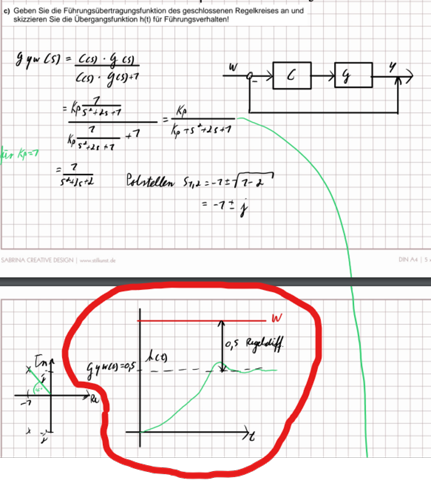
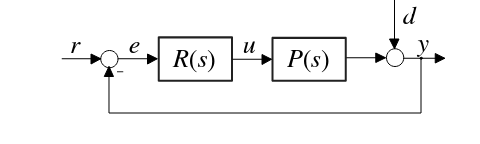
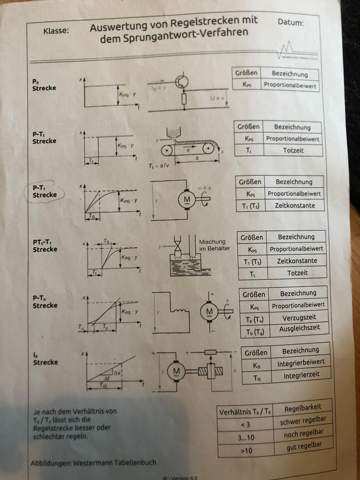
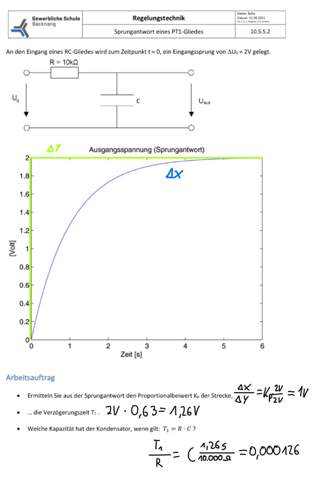
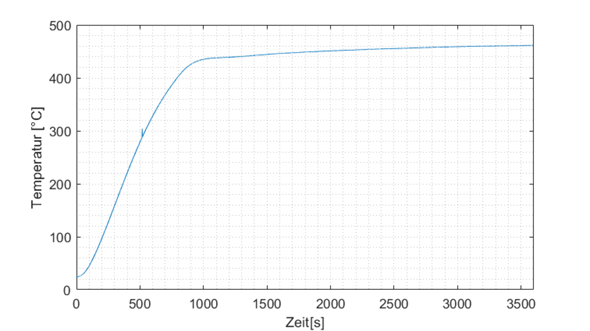
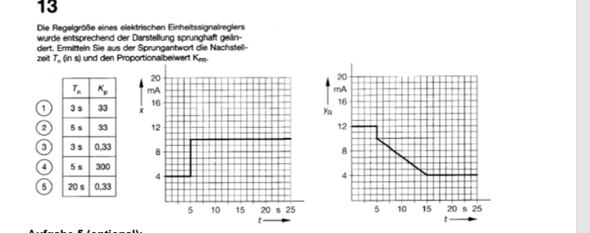
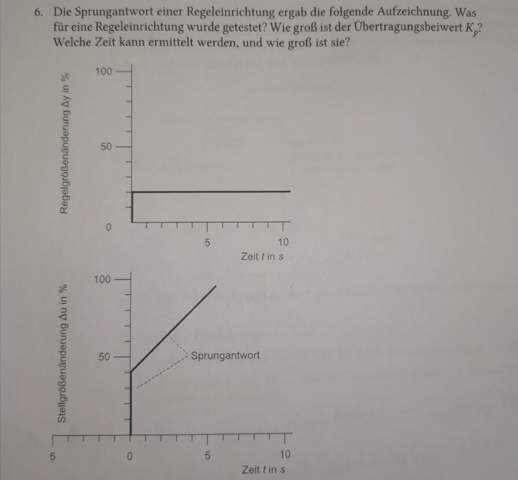
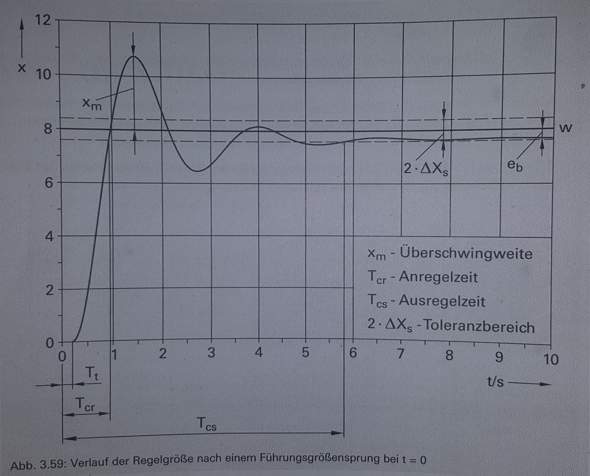
2.) Wir hatten uns mal damit beschäftigt, aus so einem Diagramm wie oben einen Regler einzustellen. Dafür muss man beim 63,2%-Wert auf die t-Achse loten und T2 ablesen. Dort, wo der rote Strich ist, das ist nicht der T2-Wert. Es hängt damit zusammen, dass man TU+T1+T2 rechnet, richtig? T1 ist, wo der Wendepunkt ist. Und TU ist dort, wo die Wendetangente auf die x-Achse trifft, richtig?