Elektrotechnik/Automatisierungstechnik: Bewertung einer Regelung anhand folgender Kriterien?
Hallo,
ich muss eine Regelung anhand folgender Kriterien bewerten, und die entsprechenden Kennwerte den folgenden Kriterien zuordnen :
-Die Stabilität
-Die Genauigkeit
-Die Dämpfung
-Die Schnelligkeit
-Und die Robustheit
Die Kennwerte:
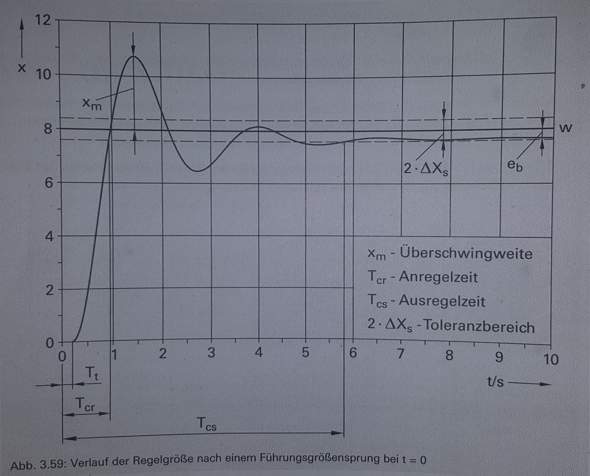
Xm - Überschwingweite
Tcr - Anregelzeit
Tcs - Ausregelzeit
2Xs - Toleranzbereich
Was die Genauigkeit und die Schnelligkeit betrifft, bin ich mir im klaren:
Genauigkeit: Ja, die Regelung befindet sich im Toleranzbereich Xs und ist genau.
Schnelligkeit: Ich vermute, wie schnell die Reglung konstant im Toleranzbereich ist (Ich vermute dass es der Kennwert Tcs ist (wie lange die Ausregelzeit ist) )
Doch bei der Robustheit, Dämpfung und die Stabilität einer Regelung fällt mir leider nichts ein.
Ich hoffe auf eure Unterstützung, danke.
1 Antwort
https://de.wikipedia.org/wiki/%C3%9Cberschwingen
Bei Regelkreisen kann ein Überschwingen auftreten, wenn der Sollwert verändert wird. Dies tritt beispielsweise bei einer Raumheizung auf, wenn die gewünschte Temperatur (Sollwert) am Heizkörperthermostat von 20 °C auf 25 °C erhöht wird; der Regler erhöht die Heizleistung dadurch so stark, dass kurz eine Temperatur von beispielsweise 27 °C erreicht wird; danach sinkt die Temperatur wieder und erreicht erst später den Sollwert 25 °C. Ursache sind Verzögerungszeiten im Regelkreis, die zum Beispiel durch die Wärmekapazität des Heizkörpers und des zirkulierenden Wassers verursacht werden.
Überschwingen kann auch auftreten, wenn eine Störgröße plötzlich verändert wird; bei einer Heizungsregelung wäre das beispielsweise, wenn ein Fenster geöffnet wird.
Starkes Überschwingen eines Reglers deutet auf geringe Stabilität des Regelkreises hin. Bei geringerer Verstärkung wird der Endwert asymptotisch erreicht, es tritt kein Überschwingen auf, aber gleiche Endwerte werden später erreicht.
In der Elektrotechnik und Signalverarbeitung ist das Überschwingen ein wichtiges Charakteristikum jeder Übertragungsfunktion und somit von Verstärkern, Filtern und anderen Einrichtungen zur Verarbeitung und Übertragung von Signalen. Das Überschwingen wird in der Praxis mit Rechtecksignalen gemessen. Überschwingen tritt auf, wenn höhere Frequenzen stärker als niedrige verstärkt werden, insbesondere auch bei Resonanzen im Frequenzgang.
https://de.wikipedia.org/wiki/Regelungstechnik#Stabilit%C3%A4t
Regeleinrichtung[Bearbeiten | Quelltext bearbeiten]Dazu gibt es eine Vielzahl von mathematischen und grafischen Verfahren.
Ein Regelkreis ist stabil, wenn nach einer endlichen Erregung durch Führungs- oder Störsignale seine Regelgröße endlich bleibt. Verschwindet diese Erregung, dann klingt die Regelgröße gegen Null ab.
Ein lineares dynamisches System G(s) ist stabil, wenn seine Gewichtsfunktion {\displaystyle x_{a\delta }(t)} (Impulsantwort) asymptotisch gegen Null abklingt.
Überschreitet die Gewichtsfunktion {\displaystyle x_{a\delta }(t)} mit wachsender Zeit {\displaystyle t} einen endlichen Wert nicht, ist das System grenzstabil. (typisch bei einem I-Glied)
Regelkreise: Stabile zeitinvariante lineare Regelstrecken dritter und höherer Ordnung werden mit einer zu hohen P-Verstärkung des Reglers oszillatorisch instabil.
Dynamische Systeme: Lineare zeitinvariante Systeme beliebiger Ordnung mit einer reellen positiven Nullstelle in der rechten s-Halbebene verhalten sich global monoton instabil.
Enthält die Regelstrecke instabile Pole, die durch identische Nullstellen des Reglers gekürzt werden, dann ist der geschlossene Regelkreis instabil! Die Kürzung instabiler Nullstellen der Regelstrecke gegen instabile Pole des Reglers führt ebenfalls zur Instabilität.