Wodurch entsteht das Sattelmoment bei Asynchronmotoren?
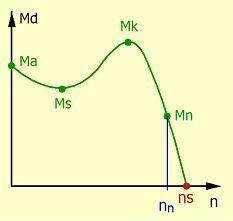
Wenn ich mir Drehmomentkennlinie eines Asynchronmotors anschaue, fällt das Drehmoment nach dem Start ab und danach steigt dieser bis zum Kipppunkt an.
Meine Frage: Warum fällt das Drehmoment ab bzw. wodurch entsteht dieser Sattelmoment (MS)?
2 Antworten
Du hast bei der Asnychronmaschine im wesentlichen 2 Mechanismen, das eine ist die Induktion des Läuferstromes, diese ist Betragsmäßig am größten wenn die Differenz aus Drehgeschwindigkeit und Drehfeld am größten ist also im Stillstand.
Im Stillstand ist es jetzt aber so, dass der Strom zwar am größten ist allerdings steht der Rotor und das Feld im Rotor ist aufgrund seiner Induktivität träge. Das Statorfeld ist nun schneller als das Rotorfeld und überholt es das bewirkt, dass das Drehmoment oszilliert und mal positiv und mal negativ ist.
Da das Statorfeld aber zumindest etwas mitdreht ergibt sich im Mittel ein positives Moment welches aber natürlich kleiner als das Kippmoment ist, das ist das Anlaufmoment. Bei Synchronmaschinen ist diese Schwingung mittelwertfrei und daher haben Synchronmaschinen fast kein Anlaufmoment sofern sie keinen Dämpferkäfig besitzen.
Der Motor dreht sich nun und der Statorstrom nimmt ab, aber das Drehfeld oszilliert noch daher sinkt zunächst das Drehmoment.
Irgendwann ist der Stator nun schnell genug dass das Rotorfeld nun mit dem Statorfeld mitbewegen kann und das Drehmoment wird immer weniger wellig und steigt daher im Mittel an.
Beim Kippmoment ist die Phasenverschiebung zwischen Stator und Rotorfeld am größten, das Magnetfeld hat hier quasi den größten "Hebel" und das Moment ist daher maximal. Ebenso ist die Effizienz am höchsten. (Siehe Lorentzkraft und Kreuzprodukt)
Bei steigender Drehzahl bleibt das zwar so, aber der Strom fällt durch die Sinkende Induktion immer weiter ab. Bei Synchroner Drehzahl wäre der induzierte Strom und damit das Moment 0.
Naja der Schlupf ist der Unterschied der Winkelgeschwindigkeit zwischen Drehfeld und Läufer.
Ein negativer Schlupf würde bedeuten, dass sich die Maschine gegen das Drehfeld bewegt, das wäre dann der Generatorbetrieb.
Der Winkel zwischen Drehfeldzeiger und Läuferstromzeiger geht natürlich auch in das Moment ein, denn das Drehmoment ist Proportional zu Statorstromstärke, Läuferstromstärke und dem Sinus des Winkels zwischen diesen beiden Zeigern, allerdings ist dieser Winkel bei der Asynchronmaschine gar nicht mal so einfach mehr zu beschreiben, bzw nicht direkt steuerbar. Daher ist eine FOC für Asynchronmaschinen auch wesentlich aufwendiger als für eine PSM.
Der Schlupf selbst geht über das Induktionsgesetz in den Läuferstrom ein. Im wesentlichen ist die Differenzgeschwindigkeit aus Drehfeld und Läufer die Zeitliche Änderung des Magnetischen Flusses im Induktionsgesetzt, daher ist bei Synchroner Drehzahl (Schlupf = 0) die Änderungsrate 0 und daher die Induktion auch 0.
Bei Synchronmaschinen auf der anderen Seite gibt es diesen Winkel schon auch in der Beschreibung wobei er hier Polradwinkel genannt wird und nicht Schlupf und dieser ist ebenfalls Lastabhängig.
Also bei Synchronmaschinen ist der Polradwinkel Lastabhängig und bei Asynchronmaschinen der Schlupf.
Bitte beachten: Das Kippmoment ist nicht mit dem Nenndrehmoment zu verwechseln. Bei Erreichen des Kippmoments nimmt der Motor mehr Strom ( also auch Leistung) auf. Das geht auf Dauer nicht gut. Ist für nicht berechnete Anwendungen wichtig. "Der Motor schafft das, also ist alles gut". Mal den Strom messen und mit dem Typenschild vergleichen, dann ist man auf der sicheren Seite.
Korrekt!
Die Kraft auf den Läufer hängt vom Schlupf ab. Also Winkel zwischen Drehfeld und Läufer. Je größer der Schlupf, desto mehr Kraft wirkt auf den Läufer, also mehr Drehmoment. Ist der Läufer aber langsamer als das Feld, dann wird der Schlupf immer größer, dann negativ.
Hat sich das System "gefangen", der Läufer eilt dem Drehfeld hinterher, sorgt eine Belastung für einen größeren Schlupf und der Motor antwortet mit mehr Drehmoment. Der Schlupf wird dann nicht mehr größer und ist proportional zur Belastung.