Raspberry Pi PID Motor Control?
Nabend zusammen,
ich hab folgendes vor: Ich hätte gerne ein Potentiometer in Form eines Faders und einen Motor, den ich mit diesem Fader steuern kann. Nun soll sich der Motor allerdings nicht die ganze Zeit drehen und die Geschwindigkeit durch den Fader beeinflusst werden. Ich möchte, dass wenn der Fader auf 0% steht, der Motor auch eine 0 Stellung hat und sich nicht dreht. Wenn ich den Fader hoch und runter schiebe bewegt sich der Motor. (Beispielsweise: Hoch im Uhrzeigersinn und Runter gegen den Uhrzeigersinn).
Der Motor soll sich also quasi 1 mal komplett drehen, wenn ich auf 100% gehe. Hab da ein Video zu gesehen, da nennen die das PID Control, also das das wirklich alles zeitgleich passiert.
Später soll’s dann aber schon so sein, dass sich der Motor 100 mal dreht, wenn ich auf 100% hoch ziehe. Also für jedes Prozent eine Umdrehung.
Nun mein Problem: ich hab weder ein Raspberry Pi noch kenne ich mich damit aus. Ist mein Vorhaben ein eher leichteres Projekt? Oder gibt es schon irgendwo einen entsprechenden Code, den ich einfach abändern kann?
danke schonmal im Voraus :)
2 Antworten
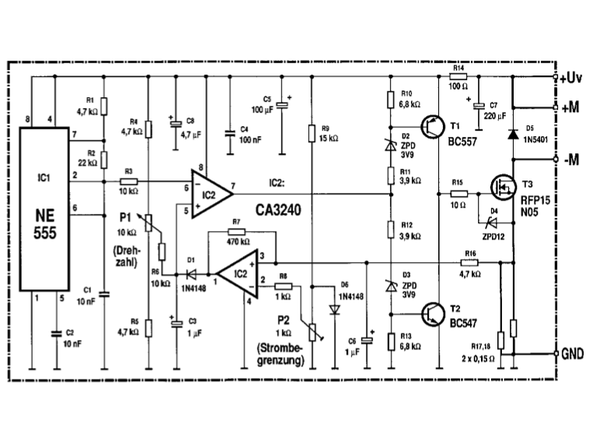
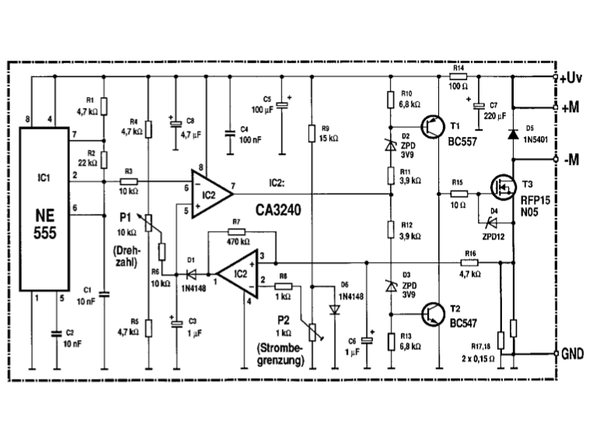
Schau mal hier: Für 12V Gleichstrommotoren. Dauerbelastbar bis zu 10A.
R17 und R18 müssen mit 5 Watt belastbar sein und als Drahtwiderstandausführung. Für die anderen Widerstände werden ganz normale Kohleschichtwiderstände verwendet.
T3 kommt auf einen solchen Kühlkörper: https://www.elv.de/velleman-kuehlkoerper-fuer-to220-geaeuse-1000-k-w-mit-pins.html?refid=SEM_30003&gclid=EAIaIQobChMIpe-xiKqN2QIVBLftCh2p9A7eEAQYBCABEgIOo_D_BwE
Hier ein passendes Poti: https://www.reichelt.de/?ARTICLE=73865&PROVID=2788&gclid=EAIaIQobChMIiee3oaqN2QIVpbftCh2_IAx0EAQYASABEgKQT_D_BwE
- also ein PID-Regler sorgt dafür, dass die Regelgröße möglichst der eingestellten Führungsgröße entspricht, wobei der Regler die Stellgröße vorgeben kann... https://de.wikipedia.org/wiki/Regler#PID-Regler
- in deinem Fall könnte man soetwas verwenden, um z. B. ein über das Ziel hinausschießen zu vermeiden (also ein vorsichtiges Abbremsen wegen der Massenträgheit des Rotors deines Motors), und um ein langsames Anfahren zu erreichen (um den Motor zu schonen)...
- viel wichtiger ist aber erstmal, dass du weißt, wo der Motor grad steht... dazu fällt mir nur n Mikrocontroller und ein sog. „Rotary Controller“ (z. B. son Ding an dem Maus-Wheel) ein... oder eben ein Schrittmotor...