hallo, es geht um folgendes:
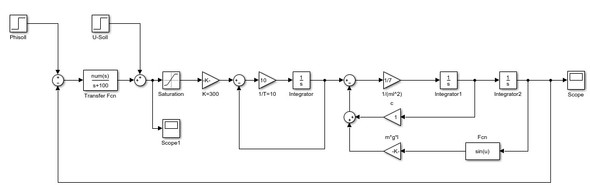
mit Matlab und Simulink wurde ein nichtlinearer Roboterarm mit Stellmotor simuliert.. dabei wurde eine Linearisierung um eine Ruhelage des Systems durchgeführt und mit diesem linearen System ein stabilsierender Regler ausgelegt...
dieser Regler sollte dann wiederum am nichtlinearen "Originalmodell" getestet werden... dazu sollte der Roboterarm (Regelgröße Winkel) von 0 auf 45° angehoben werden... das hat aber nur geklappt, wenn man zu der Stellgröße des Reglers eine vorher gegebene Sollstellgröße hinzuaddiert hat...
Wenn diese Sollwertstellgröße nicht vorhanden wäre, würde der Roboterarm nicht auf die 45° kommen...
Das verstehe ich nicht ganz. Müsste das geregelte System nicht automatisch auf Phisoll kommen, auch wenn es keinen Sollwert für die Stellgröße gibt? Das ist doch der Sinn der Regelung, dass solange geregelt wird, bis der gewünschte Wert erreicht wird..