Kreisel Drehimpuls als Matrix?
Rechnerisch verstehe ich es glaube ich schon, aber was bedeutet diese Rechnung praktischen Sinne, wenn sie so wichtig ist?
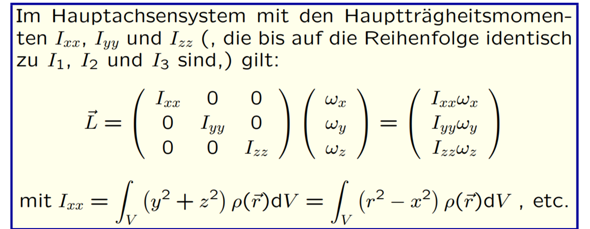
L ist ja Iw, also verstehe ich, dass es als Vektor auf x, y und z aufgeteilt ist.
Macht man das mit der Matrix nur, weil man auf genau dieses Ergebnis kommen will, oder bedeutet die Matrix an sich auch irgendwas?
3 Antworten
Die Matrix ist der Trägheitstensor. Wenn deine Drehachsen genau den Hauptträgheitsachsen entsprechen und die Matrix somit Diagonalform mit den Hauptträgheitsmomenten hat, ist das in der Tat nur eine Variante hinzuschreiben, dass man komponentenweise die Hauptträgheitsmomente mit den Winkelgeschwindigkeiten multipliziert.
Wirklich praktisch nützlich wird der Formalismus des Trägheitsensors, wenn man neben Hauptträgheitsmomenten auch Deviationsmomente hat.
Der allgemeine Zusammenhang zwischen Drehimpuls und Winkelgeschwindigkeit wird durch den Trägheitstensor vermittelt. Dieser hat zur Folge, dass der Drehimpuls i.A. nicht parallel zur Drehachse ist (Unwucht). Es gibt aber durch einen Punkt (muss nicht der Schwerpunkt sein) immer drei Achsen, um die ein Körper ohne Unwucht drehen kann, das sind die Hauptträgheitsachsen und um diese geht es hier.
Ein Tensor ist diese Matrix deshalb, da sich diese bei Koordinatentransformationen entprechend einer allgemeinen Regel verhält. Aber das ist in diesem Zusammenhang nicht relevant.
Ob etwas "praktisch" oder "unpraktisch" ist, darauf nimmt die Physik keine Rücksicht. Es "ist" einfach so - insofern verstehe ich einen Teil deiner Frage auch nicht.
https://de.wikipedia.org/wiki/Tr%C3%A4gheitstensor
Das ist der Trägheitstensor