
Wie kann man am Besten einen Linienfolger in Lego Mindstorms machen (Variablen, etc)?
Hallo Zusammen
Gerne möchte ich mit Lego Mindstorms einen "Schwarze Linienfolger" programmieren. Wie mache ich das am Besten? Er soll möglichst schnell und sicher fahren. Wie kann man das mit Variablen machen? Oder gibt es einen besseren Weg? (ohne Variablen?) Kennt Ihr sonst Webseiten oder Tutorials (am Besten auf Deutsch oder mit deutschen Untertitel)
Der Roboter funktioniert bereits, aber dafür sehr langsam und relativ unsicher. Was kann ich dafür machen, damit er nicht so unsicher fährt?
Der Roboter soll mit zwei Sensoren funktionieren.
Danke im Voraus;)
3 Antworten
Einfachster Fall: Du brauchst eine Endlosschleife. Der Roboter sollte die ganze Zeit volle Geschwindigkeit fahren. In der Endlosschleife wird der Wert des Farbsensors abgefragt. Bei einem hellen Untergrund wird nach rechts gelenkt, bei einem dunklen nach links. Das führt dazu, dass der Roboter der Linie zickzackförmig folgt.
Für alles kann man Variablen machen. Ich verstehe diese Frage nicht. Was willst du denn in diesen speichern? Man sollte sich nicht überlegen, was man mit Variablen machen könnte, sondern, wofür man Variablen benötigt. Du solltest vorher wissen, was du speichern musst, und nicht erst im Nachhinein überlegen, was du speichern könntest, denn dann ist es i.d.R. gar nicht erforderlich.
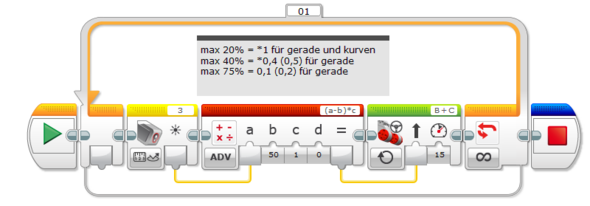
Mit nur einem Sensor ohne "Ententanz" und damit einer sehr schnellen Fahrt geht das wie im Bild dargestellt. Ist mit der LEGO-Software für EV3 geschrieben. Sollte aber verständlich sein.
Hierzugibt es viele Studien und Veröffentlichungen. Z. B.
http://stefans-robots.net/de/linienfolger-mit-richtungssteuerung.php
Funktioniert denn das auch mit zwei Sensoren?
Wenn ja, wie?
Die Fragen sind auf den ersten Link bezogen.
Du hast vorne zwei Lichtsensoren nebeneinander. Der eine versucht die Linie von rechts und er andere von links zu erfassen. Dadurch kann die Fahrt einer Linie entlang sehr stark beschleunigt werden.
Danke vielmal. Kennen Sie sonst noch ein paar Links, die so, wie der erste sind, aber für EV3?
Leider ist mir so etwas speziell für den EV3 nicht bekannt. Das ist aber vergleichbar und programmtechnisch kein großer Unterschied. Wohl gibt es den Unterschied zwischen Licht- oder Farbsensor und zum Einsatz von einem oder zwei Sensoren.
Kann man das auch mit Variablen machen?