Technische Mechanik - Versetzungsmoment! Kann mir jmd. das erklären?
Ich übe gerade für die Prüfungen in Technischer Mechanik. Leider komme ich bei der Aufgabe nicht wirklich weiter... Der Moment wurde in dem Buch gerade eingeführt & jetzt bezieht sich der Autor auf den Versetzugsmoment "Wir ermitteln jetzt den Versetzungsmoment...:"
Wie kommt man darauf, dass F rv X = M ra ??
Nachvollziehbare hilfe wäre super nett !!
3 Antworten
Ist viel einfacher als es aussieht.
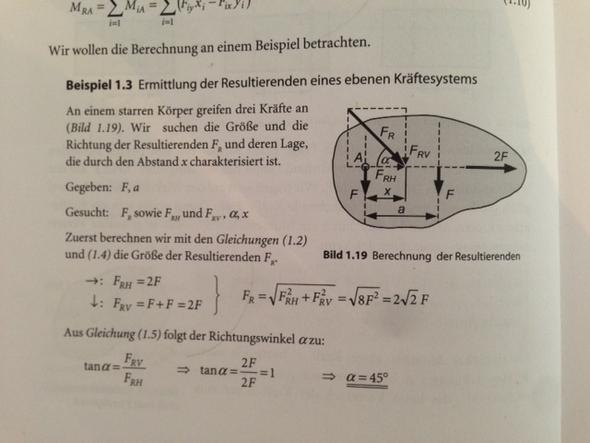
Du hast ein System aus drei Kräften, und willst es möglichst einfach abstrahieren. Dazu wird zunächst die resultierende Kraft berechnet. 'Kräftemäßig' hast du das System dann abgebildet, allerdings fehlt jetzt noch die Information, dass die Kräfte ja auch Momente in Bezug auf den Schwerpunkt / einen Bezugspunkt bewirken.
Dieses resultierende Moment bezüglich dem Bezugspunkt (A) musst du bestimmen, aber glücklicherweise steuert dazu ja nur die eine Kraft F im Abstand a etwas bei. (Bei einem anderen Bezugspunkt wäre das durchaus komplizierter - du siehst also, mit der richtigen Wahl eines solchen Punktes kannst du dir eine Menge Arbeit ersparen ;) )
Zusammen bilden die resultierende Kraft und das Moment das System nun vollständig ab (beide greifen in diesem Fall am Bezugspunkt an!). Bei dem Moment spricht man auch von einem Versetzungsmoment, weil es die Hebelwirkung der resultierenden Kraft / des Kräftesystems gerade ersetzt!
Um das abstrahierte System auf nur eine Größe zu bringen kannst du die resultierende Kraft noch verschieben.
Betrag und Richtung der Kraft sind durch die Komponenten ja vorgegeben, der Abstand zum Bezugspunkt lässt sich aber variieren. Mit der Gleichung:
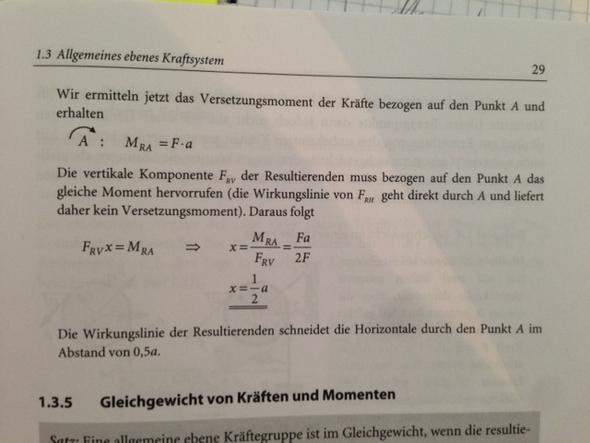
F_rv · x = M_rasuchst du nun diesen Abstand, bei dem eben das Moment, das die 'verschobene' resultierende Kraft verursacht, genau gleich groß ist wie dein schon berechnetes resultierendes Moment.
Bei diesem Beispiel ist es einfach, weil ja nur eine der Kräfte ein Moment verursacht. In anderen Fällen musst du aber unter Umständen beide Komponenten mit einbeziehen, um auf das entsprechende Moment zu kommen:
± F_res_vertikal · x ± F_res_horizontal · x = M_res_bzgl_Pkt_ADie Vorzeichen musst du aber je nach Fall entsprechend einfließen lassen!
Ich hoff' mal ich hab jetzt alle Klarheiten beseitigt :D
mfg
In Kurzform:
Das Drehmoment ist einfach M = - F * a (wenn die vertikale Achse nach unten orientiert ist, die Rechtsachse nach rechts und die y Komponente dann nach der Dreifingerregel dann aus dem Bildschirm raus)
In der resultierenden Kraft ist nur die vertikale Komponente für das Drehmoment verantwortlich, und diese längs der Strecke x, also M = - 2F * x.
Das war's dann ja
Das ist doch ganz klar:
F*s=M.
Das Teil ist in A befestigt, und um das Drehmoment in A zu berechnen, nimmt man die senkrechte Komponente der Resultierenden und multipliziert sie mit dem Hebel.